
Camera 3D – Time-of-Flight (ToF)
Imagini spațiale
Viziunea spațială este extrem de importantă pentru oameni și de aici se pune întrebarea. De ce majoritatea camerelor arată o imagine plată în loc de o imagine mult mai naturală în trei dimensiuni? Pentru a răspunde la această întrebare, trebuie să analizați istoria modului în care oamenii au încercat să reproducă profunzimea în imagini. Prima metodă care a fost stăpânită și este folosită și astăzi este metoda stereografiei în care, prin observarea unei scene cu două camere, s-a obținut efectul adâncimii spațiale. Procesarea digitală a imaginii a permis obținerea unei metode mai bune, datorită combinării a două fotografii într-una și unei astfel de manipulări a culorilor, încât în ochelari speciali cu un pahar albastru și cealaltă sticlă roșie, fiecare ochi vede o imagine diferită. În prezent, cinematografele folosesc tehnologia IMAX, datorită polarizării adecvate a imaginii și a lentilelor din ochelari, oferă o imagine netedă și tridimensională. Toate aceste tehnologii de imagini special realizate cu cerințe mult mai mari decât imaginile în două dimensiuni, acest lucru ne duce la concluzia că captarea imaginilor în 3D necesită procese mult mai complicate decât achiziția în două dimensiuni. Procesele mai complexe necesită mai multe resurse, tehnologii mai avansate și interpretarea mai multor date, ceea ce face ca camerele de achiziție 3D să fie de obicei mai scumpe și mai complicate de utilizat. Imaginea 2D oferă, de asemenea, o reprezentare mai fidelă a structurilor și culorilor. Acest lucru face camerele 3D o curiozitate inutilă? Nimic nu ar putea fi mai greșit. Lumea de astăzi a automatizării care tinde spre automatizare creează o cerere pentru sisteme de viziune spațială. Mașinile controlate de inteligență artificială sau mașinile de ambalare sunt câteva dintre exemplele de aplicații. Iar numărul lor este în continuă creștere. Din acest motiv, au fost dezvoltate o serie de tehnologii care permit camerelor să dobândească imagini 3D, care vă permit să potriviți perfect camera cu aplicația.

Tehnologii de achiziție de imagini 3D
Tehnologiile de achiziție de imagini 3D diferă semnificativ unele de altele și reprezintă avantaje complet diferite. Imaginile spațiale menționate mai sus au fost obținute prin metoda stereoviziunii. Această metodă utilizează date de la două imagini ale camerei și folosește un algoritm pentru a combina același punct din spațiu din două fotografii. Datorită acestui lucru și cunoașterii poziției relative a camerelor, este posibilă recrearea adâncimii imaginii. Această tehnologie este aproape identică cu ceea ce are loc în timpul procesului nostru de vizionare, ceea ce prezintă o serie de avantaje, precum posibilitatea de a obține o precizie ridicată pe distanțe scurte sau posibilitatea de a folosi două camere 2D în locul unei camere 3D. Cu toate acestea, această metodă necesită algoritmi complecși și o metodă precisă de regăsire a imaginilor. Acest lucru face stereoviziunea costisitoare, complexă și dificil de utilizat pentru aplicații în timp real. O abordare complet diferită a înregistrării unei imagini spațiale este metoda de triangulare cu laser. Tehnologia folosește lumină laser care se reflectă asupra obiectului observat și merge la cameră. Unghiul la care este înregistrată lumina laser permite calcularea distanței de la cameră la obiect. Această tehnologie este ideală pentru aplicațiile în care dorim să cunoaștem distanța exactă a obiectelor observate față de cameră, dar pentru ca un astfel de sistem să funcționeze corect este nevoie de componente de înaltă calitate. Sistemul necesită condiții de lucru aproape neschimbate, obiectul nu se poate mișca prea repede sau nu poate fi departe de cameră. Ținând cont de dezavantajele sistemelor anterioare, Basler a creat camere bazate pe tehnologia ToF (Time of flight). Această tehnologie, spre deosebire de cele anterioare, nu necesită sisteme complete de măsurare, ci un singur aparat compact. Singura întrebare este cum funcționează?
Principiul de funcționare al camerelor ToF
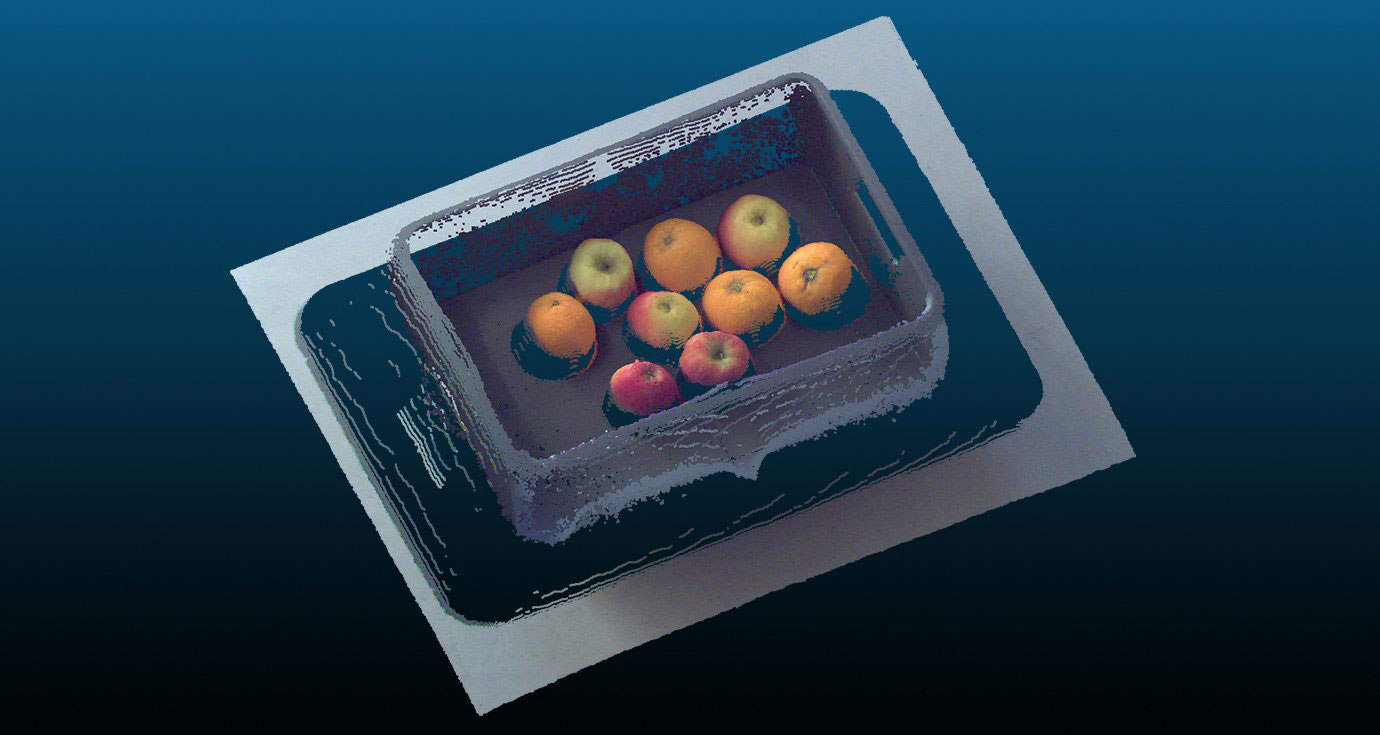
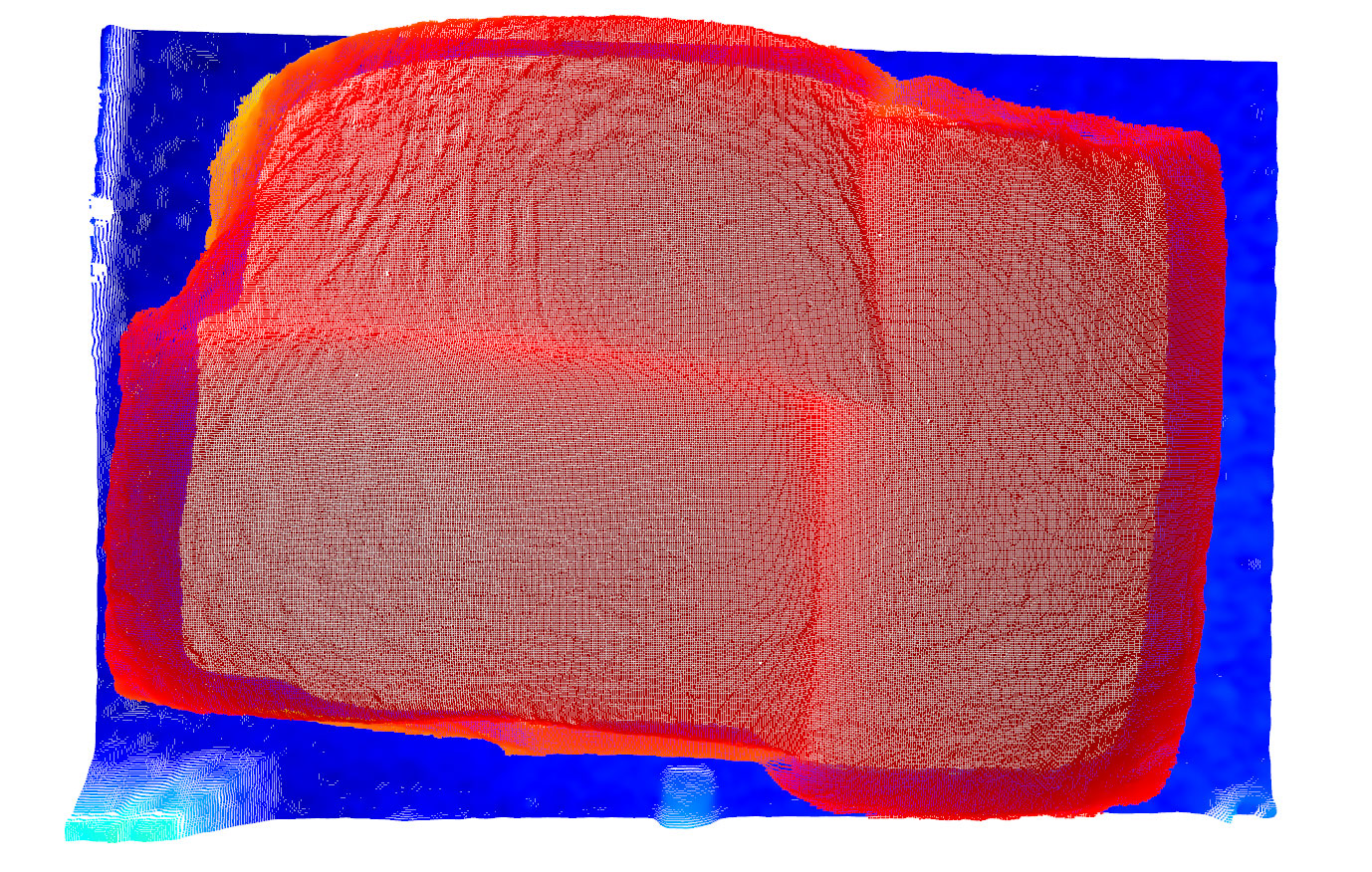
Metoda ToF folosește o sursă de lumină modulată integrată cu camera, care este reflectată de obiectul observat și înregistrată de senzor. Acest lucru sună foarte asemănător cu metoda de triangulare cu laser, dar aici se bazează pe un principiu complet diferit. Metoda este împărțită în funcție de modul de funcționare al iluminatorului în continuă sau în impulsuri. În metoda ToF continuă, se examinează defazajul dintre unda luminoasă de la iluminator și cea citită de senzor, ceea ce permite calcularea distanței până la obiect. În metoda pulsului utilizată în camerele ToF Basler, unitatea de control al obturatorului sincronizează achiziția cadrului cu impulsurile de lumină, permițând doar unei părți din lumina trimisă de iluminator să ajungă la senzor. Pentru a-l vizualiza, puteți folosi o analogie în care fiecare pixel este o țară și lumina iluminatorului conduce un camion care pleacă în străinătate. Este nevoie de ceva timp pentru ca camionul să conducă la destinație (aici obiectul care este observat) și înapoi. La acel moment, însă, statul închide granițele și unele dintre camioane nu se pot întoarce. Cunoscând timpul după care granițele au fost închise după expedierea camioanelor (presupunând că toate au călătorit cu aceeași viteză), se poate determina dacă locul spre care a călătorit camionul a fost mai aproape sau mai departe decât distanța rezultată din produsul de viteza camionului și timpul scurs împărțit la doi. Schimbând timpul după care se închide granița, poți obține din ce în ce mai multe informații despre distanța destinațiilor tale. În mod similar, obturatorul blochează accesul luminii reflectate de la un obiect care se afla la o distanță mai mare decât produsul dintre viteza luminii în aer și timpul de la pulsul luminii până la închiderea obturatorului împărțit la doi. Apoi, după modificarea repetă a vitezei de expunere, se însumează semnalele care au ajuns la senzor și cantitatea de lumină care a ajuns la acesta, puteți determina cât timp a durat luminii să ajungă la fiecare pixel al senzorului și astfel să creați o grilă de puncte. crearea unui model spațial al obiectului observat. Pare complicat, dar este cea mai simplă și mai accesibilă dintre toate metodele de achiziție de imagini 3D. O mare dovadă a eficacității și ușurinței de utilizare a acestei tehnologii este că dispozitivul care o folosește s-a vândut în milioane de exemplare și este folosit și astăzi. Acest dispozitiv este camera kinect pentru Xbox 360, iar acum începe să apară și pe smartphone-uri.

Avantajele și dezavantajele camerelor ToF
Camerele ToF se remarcă cu siguranță față de concurența în achizițiile 3D prin confortul lor de utilizare și accesibilitatea, cu toate acestea, nu este o soluție ideală și are multe dezavantaje. De departe, cel mai mare dezavantaj al utilizării undelor luminoase care se întorc la senzor pentru imagini este că orice altă lumină prezentă în spațiul de lucru al camerei va afecta negativ acuratețea măsurării.
Aceste camere pot avea, de asemenea, probleme la modelarea obiectelor strălucitoare sau reflectorizante. Cu toate acestea, acest dezavantaj poate fi și un avantaj. Aceste camere nu au nevoie de iluminatoare suplimentare si pentru unele aplicatii vor reprezenta o reducere semnificativa a costurilor. De asemenea, au cele mai mari posibilități atunci când vine vorba de imaginea spațiilor mari din toate tehnologiile menționate mai sus, sunt și mult mai rapizi decât ei. Prin urmare, acestea oferă mult mai multe posibilități dacă urmează să fie utilizate în timp real.
Camera Basler Blaze
Ca răspuns la cererea pieței pentru camere de imagine 3D precise și accesibile, Basler a dezvoltat camere Basler Blaze folosind tehnologia ToF. Camera este echipată cu o diodă VCSEL care permite camerei să funcționeze în timpul zilei, un senzor Sony DepthSense ™ IMX556PLR-C integrat cu pixeli CAPD (Current Assisted Photonic Demodulator) și o matrice CMOS retroiluminată. Acest lucru îi permite să efectueze măsurători 3D precise la o distanță de până la 10 metri. Camera oferă o imagine la 30 de cadre pe secundă la rezoluție VGA, permițând vizualizarea precisă a modelului testat. Blaze are o clasă de rezistență IP67 și, în plus, greutatea redusă și lipsa pieselor mobile îl fac ideal pentru montarea pe un braț robot. Interfața Gigabit Ethernet facilitează integrarea și permite utilizarea fără probleme în sistemele cu mai multe camere fără a provoca interferențe reciproce. Un avantaj suplimentar al acestei camere este că, deși camera funcționează în alb-negru, poate fi ușor integrată cu camera Basler ace 2D, ceea ce vă permite să obțineți un model color.
Camere ToF sau camere 2D
Este o cameră 2D sau 3D mai bună în aplicația mea? Răspunsul la această întrebare depinde în mare măsură de ce măsurători sau inspecții va efectua camera. Camerele 2D au performanțe mult mai bune când vine vorba de culoare, textură, dimensiuni și forma obiectelor plate. Când vine vorba de camere 3D, acestea sunt grozave pentru analiza capacității, formei întregului element sau a poziției acestuia în 3 dimensiuni. Deci va fi perfect pentru sarcini logistice precum paletizarea sau munca precisă a unui braț robot. De asemenea, prezintă un avantaj decisiv față de camerele care funcționează în două dimensiuni în medicină, unde vă permite să poziționați cu precizie pacientul pentru examinare sau să monitorizați de la distanță mișcarea pacienților. Dacă costul este mai puțin important, puteți utiliza întotdeauna un sistem cu două camere, cum ar fi Basler Blaze și Basler ace, care vă permit să profitați de ambele.